Cuda on Arm 冬令营第一天学习内容
简述
今天的主要学习内容包括课程说明,Cuda和Gpu简介,简单的Linux操作,简单的Cuda编程。
简单复习几个并行化指标、MakeFile和Cuda编程内容
并行化指标--加速比
加速比的理解
加速比主要是为了对比并行Gpu计算的情况下比串行Cpu计算代码速度有多大的提升,其计算公式在下图中:
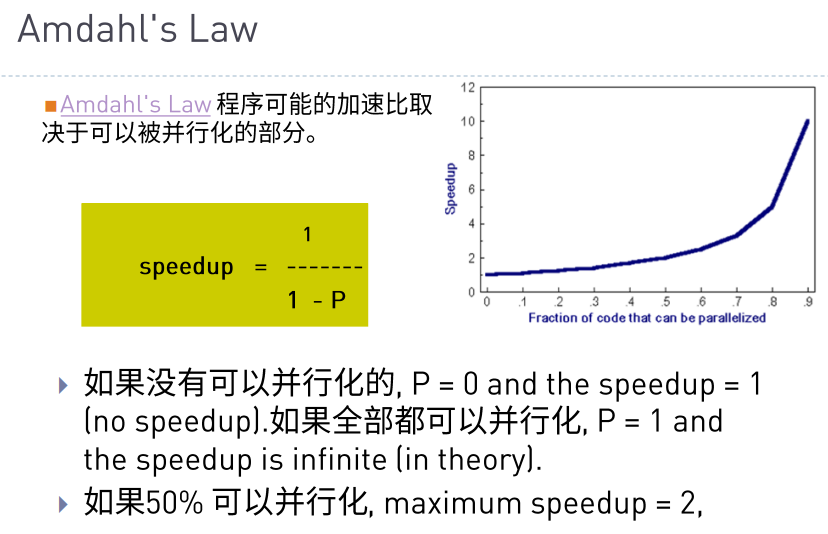
按照文字进行理解,假定有80%的内容可以进行并行话,那么
Speedup = 1 / (1 - 0.8) = 5
对于并行的加速比计算公式如下:
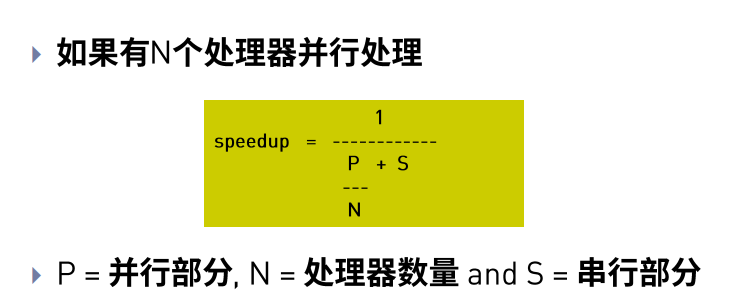
加速比的极限
加速比是存在上限的,根据上图我们可以知道,当N越大的时候,P/N就会越小,也就表示分母越小,从而加速比越大。
但是,P/N也受到P的制约,由于S + P = 1,所以S的大小也决定着加速比的上限,按照p=.50、p=.90、p=.99进行加速比计算举例,结果如图:
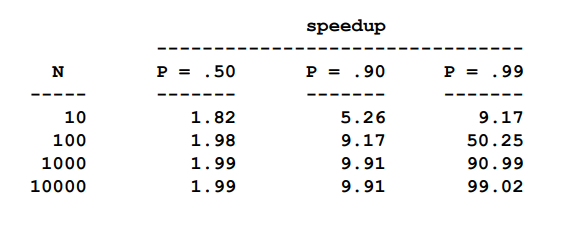
可以看到加速比是没能随着N的增加而继续增加的。
MakeFile
个人理解
MakeFile是编译C,C++的一个文件,按照MakeFile内的内容对部分的文件进行编译或者文件的生成。
简单指令示例
使用make执行MakeFile文件。如果MakeFile内写有Clean等内容,可以使用make clean执行清理操作
OBJ = main.o add.o sub.o mul.o div.o
CC = gcc
app: $(OBJ)
$(CC) -o app $(OBJ)
main.o: main.c
$(CC) -c main.c
add.o: add.c
$(CC) -c add.c
sub.o:sub.c
$(CC) -c sub.c
mul.o: mul.c
$(CC) -c mul.c
div.o: div.c
$(CC) -c div.c
.PHONY : clean
clean :
-rm $(OBJ) app 从上面的代码可以看出,临时变量写在最开始,使用的时候使用$()进行包裹指代,而clean应该写在最后,以免影响make指令的执行顺序。
其中的.PHONY : clean中应该关注.PHONY这一项,因为这个关键字主要是为了避免指令和文件名冲突,假如目录下同样存在clean文件,那么make clean在没有.PHONY的情况下会报错(可以自行尝试)。
另外需要注意,换行之后尽量使用TAB进行缩进。
Cuda代码示例
课件中同样提供了Cuda编译使用的一个示例:
TEST_SOURCE = hello_cuda.cu
TARGETBIN := ./hello_cuda
CC = /usr/local/cuda/bin/nvcc
$(TARGETBIN):$(TEST_SOURCE)
$(CC) $(TEST_SOURCE) -o $(TARGETBIN)
.PHONY:clean
clean:
-rm -rf $(TARGETBIN) 可以看到基本的内容和上面是一样的,只是编译的文件从xxx.c变成了xxx.cu,编译指令从gcc变成了nvcc。其他并无不同。
Cuda编程初识
课程内容比较多,就简单挑着自己的理解去写了。
数据传输
在进行代码之前,先对cuda的数据传输进行一定的了解,由于是操作GPU进行计算,所以主要的数据其实都应该导入到GPU的缓存中进行,包括部分指令也会在GPU上操作。
所以可以看到如下图所示:
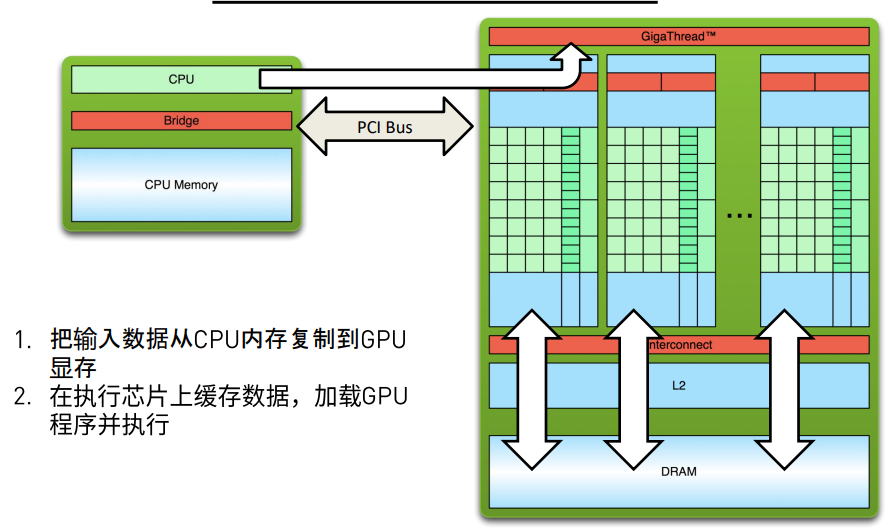
在运行执行结束之后,运算结果讲重新搬回CPU中,进行下一步的操作。如下图:
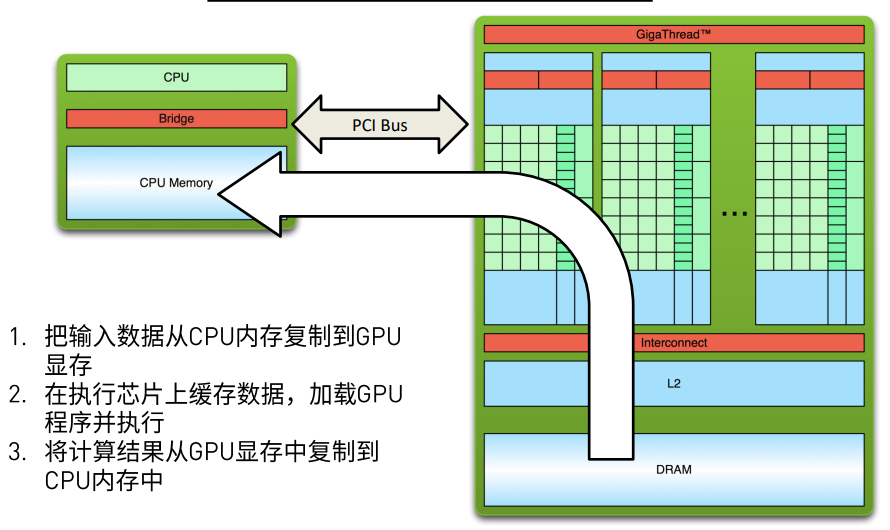
所以这几步操作会体现在代码中会有一定的复制、转移的操作,同时内存申请和释放也会比单纯的串行程序使用更多一步GPU的内存申请和释放。
运行位置
在CUDA编程中,程序执行和调用的位置会有两个,一个是CPU(也称Host),另外一个则是GPU(也称Device)。函数模式,则一共有三种,分别是:__device__,__global__,__host__。先看下图:
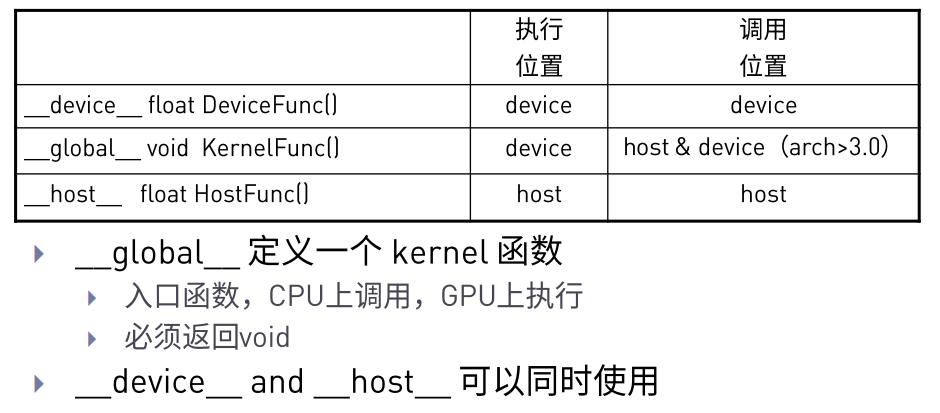
根据上图我们可以看到__device__很明显应该是在GPU设备中被调用然后执行,而__global__则是从CPU到GPU的过度函数,甚至就是使用GPU的函数,而__host__则是单纯的CPU函数,也就是常规的C函数。
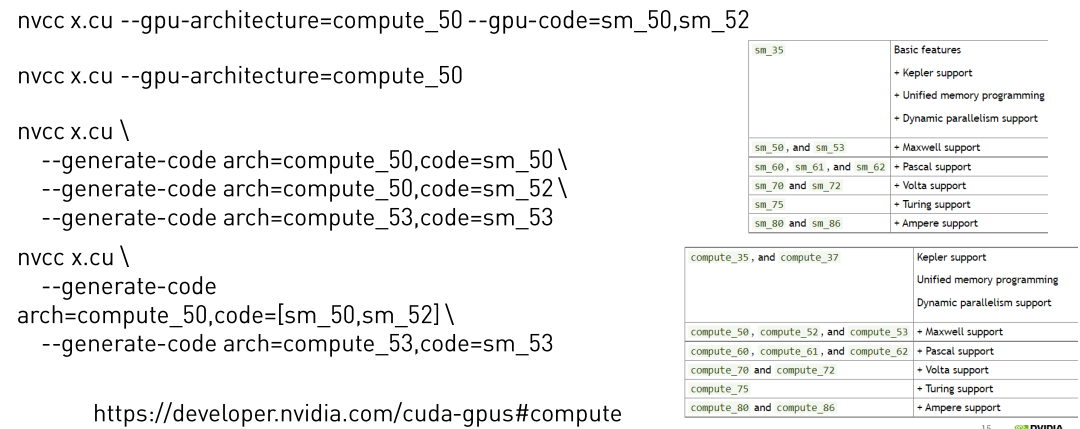
CUDA程序编译
在上面的MakeFile中已经进行了简单的差异描述,但是,为了保证编译后的文件的可用,GPU编译比CPU编译多了一个参数,通常是为了指定架构,例如arch = 60,由于走神,这里没太懂,所以放一下PPT图片:
NVPROF:程序分析软件
主要是三种模式,每种模式都有不同的显示内容:
nvprof a.exe
nvprof --print-gpu-trace a.exe
nvprof --print-api-trace a.exeCUDA线程调度
在线程调度这一部分,主要有三个层级Grid,Block,Thread,其中Thread是常见的线程,而Block是为了管理Thread而出现的,在常规的GPU core中,一个Block通常拥有32个Thread。
而Grid则是管理Block的,在线程层次和线程调度入门中,个人认为有两个地方较为重要:一是线程的组织结构,二是线程索引。
组织结构
从Thread开始,首先我们应该注意,Thread会被wrap调度器以32个为一组,组成一个wrap,但是Block才是管理thread的,所以Block_si
ze应该是以32作为倍数,比如32或者64,以求最大化使用算力。
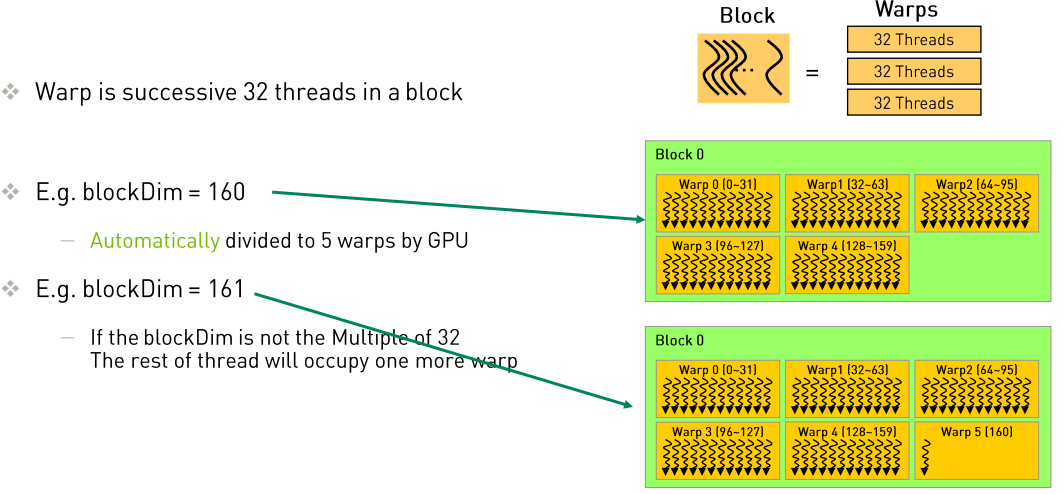
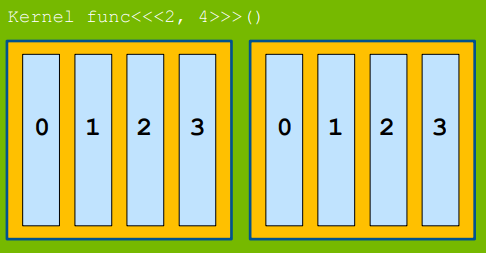
而接下来,由Thread组成了Block,在基础的情况中中,<<<BLOCKS,BLOCK_SIZE>>>表示的是申请BLOCKS个Block,每个Block内部有
BLOCK_SIZE个Thread,这时候情况较为简单,Grid的应该是一个1XBLOCKS的长矩阵,每个Block也是一个1xBLOCK_SIZE的长矩阵。
接下来是由dim3构成的高纬度线程模型,举例来说,我们可以由dim3 grid_size(3,3,3)定义出一个3x3x3的三维矩阵,在这个矩阵中,一共有27个Block,
此时,这个Grid的维度,也就是gridDim.x、gridDim.y、gridDim.z三个值,均为3,也就是blockIdx的x、y、z最大值均为2(下标从0开始)。
在这样时候,你可以把整个Grid视为一个常见的3x3的魔方,魔方上面的每一个方块都是一个Block。
而我们再定义一个dim3 block_size(3,3,3)之后,每个Block也变成了一个3x3的小魔方,此时每个Thread是组成这个魔方的一份子。
然后使用<<<grid_size,blocksize>>,我们得到的线程总数应该是729个(是 3x3x3 * 3x3x3的结果)。
线程索引
先看一句求线程索引的代码(注意,此时cuda的调度维度是<<<BLOCKS,BLOCK_SIZE>>>):
int n = blockDim.x * blockIdx.x + threadIdx.x;其中,Dim 表示的是维度,例如Block是一个10x10的矩阵,那么BlockDim.x和BlockDim.y都应该是10。
而Idx则表示索引,也就是所在位置。例如Grid组成了一个5x4的矩阵,而某个Block位于(3,2)位置,那么BlockIdx.x是2,BlockIdx.y是3。
所以我们再来看n的求得过程,其中blockDim.x * blockIdx.x作用是求得前面的Block一共占了多少个位置,然后再加上在Block内部ThreadIdx.x
来求得自己所在位置。
接下来重新读Idx的那段话,一个很奇怪的地方在于,X是2,而Y是3,这里应该这样思考,X表示的是横坐标,但是放到矩阵上,表示的其实是第几列,而Y则相反,
表示的是纵坐标,在矩阵上表达的是第几行,所以在求一个线程在一个巨型矩阵中的位置的时候,列坐标应该是用
row = threadIdx.x + BlockIdx.x* BlockDim.x而行坐标则是应该用
col = threadIdx.y + BlockIdx.y * BLockDim.yCUDA操作代码
接下来是一个Cuda的向量相加的代码示范:
#include <math.h>
#include <stdio.h>
/***
*
*/
void __global__ add(const double *x, const double *y, double *z, int count)
{
//根据所处的block和block内的线程号来确定自己处理的是数组中的哪一个值
const int n = blockDim.x * blockIdx.x + threadIdx.x;
if( n < count)
{
z[n] = x[n] + y[n];
}
}
/***
*
*/
void check(const double *z, const int N)
{
bool error = false;
for (int n = 0; n < N; ++n)
{
if (fabs(z[n] - 3) > (1.0e-10))
{
error = true;
}
}
printf("%s\n", error ? "Errors" : "Pass");
}
/***
*
*/
int main(void)
{
const int N = 100000000;
const int M = sizeof(double) * N;
double *h_x = (double*) malloc(M);
double *h_y = (double*) malloc(M);
double *h_z = (double*) malloc(M);
for (int n = 0; n < N; ++n)
{
h_x[n] = 1;
h_y[n] = 2;
}
//申请GPU内存并且进行数据拷贝
double *d_x, *d_y, *d_z;
cudaMalloc((void **)&d_x, M);
cudaMalloc((void **)&d_y, M);
cudaMalloc((void **)&d_z, M);
// cudaMemcpuHostToDevice 表示数据从CPU转向GPU
cudaMemcpy(d_x, h_x, M, cudaMemcpyHostToDevice);
cudaMemcpy(d_y, h_y, M, cudaMemcpyHostToDevice);
//
const int block_size = 128;
const int grid_size = (N + block_size - 1) / block_size;
// 调用GPU进行并行计算,这里是一个一维的grid和一维的block,分别都只有x
add<<<grid_size, block_size>>>(d_x, d_y, d_z,N);
// cudaMemDeviceToHost 表示数据从GPU转向CPU
cudaMemcpy(h_z, d_z, M, cudaMemcpyDeviceToHost);
check(h_z, N);
free(h_x);
free(h_y);
free(h_z);
//进行CUDA内存释放
cudaFree(d_x);
cudaFree(d_y);
cudaFree(d_z);
return 0;
}为了更清楚的对比,在下面放上了单纯CPU的向量相加的写法:
#include <math.h>
#include <stdlib.h>
#include <stdio.h>
void add(const double *x, const double *y, double *z, const int N)
{
for (int n = 0; n < N; ++n)
{
z[n] = x[n] + y[n];
}
}
void check(const double *z, const int N)
{
bool has_error = false;
for (int n = 0; n < N; ++n)
{
if (fabs(z[n] - 3) > (1.0e-10))
{
has_error = true;
}
}
printf("%s\n", has_error ? "Errors" : "Pass");
}
int main(void)
{
const int N = 100000000;
const int M = sizeof(double) * N;
double *x = (double*) malloc(M);
double *y = (double*) malloc(M);
double *z = (double*) malloc(M);
for (int n = 0; n < N; ++n)
{
x[n] = 1;
y[n] = 2;
}
add(x, y, z, N);
check(z, N);
free(x);
free(y);
free(z);
return 0;
}结尾
困了困了,后面的重点写的有点敷衍了。明天有精力再修改一下。